Exercise 1 - Duckiebot Assembly and Basic Development
My Duckiebot
Demos
Straight Line Demo
Even after lots of wheel trim calibration, we see that the Duckiebot still does not travel in a perfectly straight line. This is because in the real world, many of assumptions we make in class do not hold and there are many variables that affect the drift besides trim. For example, the fact that the wheels aren’t point contacts, there is friction, and uneven surfaces all can result in the drifting behavior. However, after calibration the Duckiebot drifts by less than 10 cm in a 2 m run, which the Duckumentation states is sufficient for Duckietown.
Dashboard
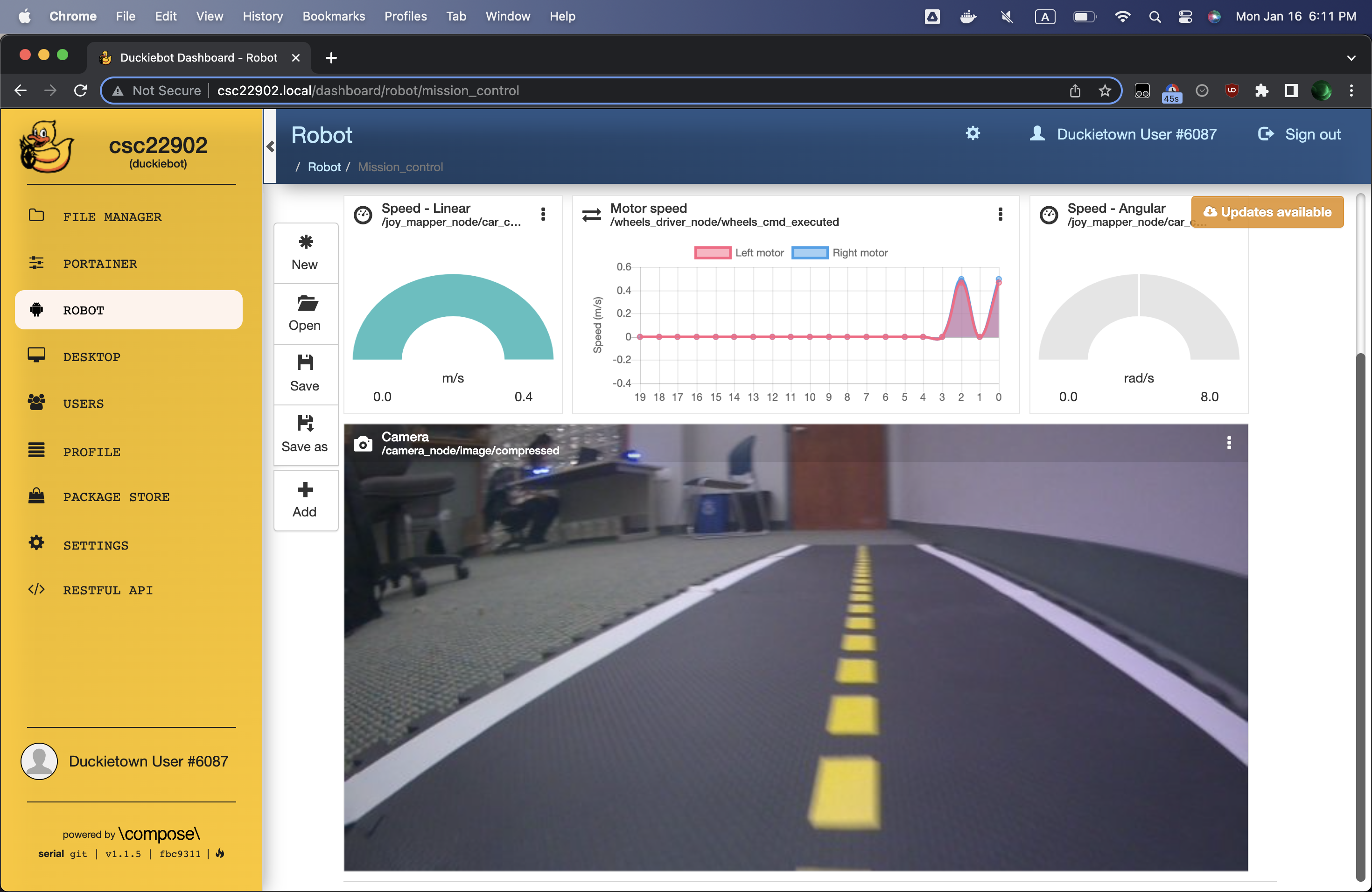
 The dashboard can readily display the camera output and motor signals from a
Duckiebot.
The dashboard can readily display the camera output and motor signals from a
Duckiebot.
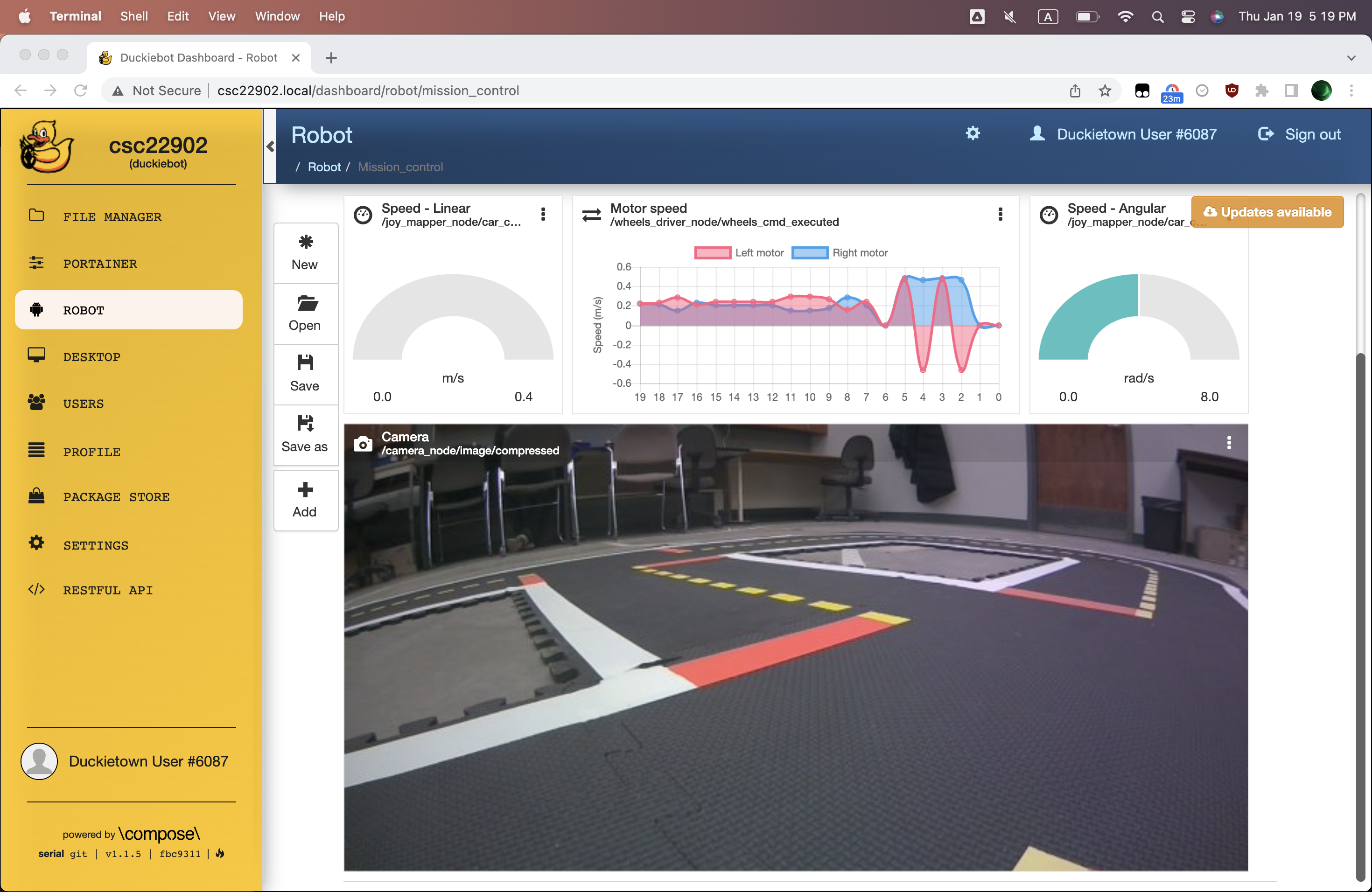
Lane Following Demo
In my first attempt, my Duckiebot constantly drove on to the white lines. However, after recalibration, the lane following demo worked pretty well suggesting that good camera and wheel calibration is important for lane following performance.
Write Up
Implemented
- A hello from Duckiebot Docker container.
- A color detector Docker container.
Exercise 1 Code Implementation
Learned
I learned the basic knowledge and skills necessary to operate on Duckiebots. I learned how to do connect to the Duckiebot, camera and wheel calibration, and how to use the Duckietown shell. Additionally, I learned about the complexities of Duckiebot networking, including how to ssh into Duckiebot with ssh duckie@csc22902.local, and most importantly how to run Docker commands on a Duckiebot using docker -H csc22902.local .... I also learned to be ready to debug what seemingly worked yesterday, with so many variables at play, things broke often, and I had to quickly find workarounds.
Challenges
macOS
A big challenge was dealing with the fact that there is no way to dual boot
Ubuntu onto a M2 Macbook. I attempted a native macOS install of dts, a Ubuntu Docker container, but both were quite buggy.
Later, I found that a nice option is to use create an Ubuntu 20.04.5 VM using UTM. It was difficult to find an Ubuntu 20.04.5 ARM image,but eventually I found one available here. I only ran into a few challenges with the Ubuntu VM, mostly due to using the ARM architecture image.
Firstly, I couldn’t install Docker Desktop, so I had to install Docker using the repository.
Some dts dependencies were broken, and I had to manually update the pip and
requests packages.
Overall, this VM seems to be fairly reliable for dts commands,
except commands that are hardcoded to rely on docker images that require AMD64
architecture like dts duckiebot calibrate_intrinsics. Considering this, it
may be worth it in the future to take the performance hit and create a VM that
emulates the AMD64 architecture.
I found a nice tutorial for accessing
a Ubuntu VM through VS Code on the host machine. This is extremely useful to
reduce context switching between the Ubuntu VM and the macOS.
The tutorial was not very explicit on a few steps, which I clarify here.
To install OpenSSH server use sudo apt-get install openssh-server.
To enable port forwarding, edit the VM’s Network setting in UTM to use Emulated
VLAN for Network Type.
mDNS
For unknown reasons, mDNS on the DuckieNet network stopped working for a few days.
This made connecting to the Duckiebot’s challenging,
as dts fleet discover and a few other dts commands
don’t work without mDNS. The best workaround I found for this issue is to add
a new entry to my /etc/hosts file. Adding 192.168.1.33 csc22902.local,
effectively allows requests to csc22902.local to map to IP address
192.168.1.33, allowing me to work past the mDNS issues. To get the IP address, I ran ping csc22902.local on the lab machine which had working mDNS. Alternatively, nmap might also work.
Color Detector
I found that the color detector exercise in the Duckumentation is outdated. I discovered that the gst_pipeline string in function template provided for Duckiebot MOOC Founder’s Edition is missing the {} necessary for format strings to work properly. However, even after putting the {} back it still did not work.
I spent a considerable amount of time looking into workarounds. I looked into
the camera driver source code, I tried
copying the gst_pipeline into my code but it also didn’t work. From this forum discussion, Honey_Patouceul suggests using the gst-launch-1.0 program to validate a GStreamer pipeline. For example,
gst-launch-1.0 nvarguscamerasrc ! queue ! nvjpegenc ! queue ! appsink,
outputted that nvarguscamerasrc ! queue ! nvjpegenc ! queue ! appsink
was a valid GStreamer pipeline. However, when I used the same pipeline in OpenCV Python
it still did not work.
The Duckumentation notes that if another process is using the camera, your code will not work, to eliminate this as a possibility, I used Portainer
to stop all the containers except colordetector and portainer.
The code still did not work. I also tried running the colordetector
container in a way more similar to how the dt-duckiebot-interface was started,
but also to no avail.
If this wasn’t an exercise focused on creating a Docker image,
it would be much simpler to use duckietown/template-ros repository and subscribe to the ROS /csc22902/camera_node/image/compressed topic instead of reverse engineering the camera driver and dt-duckiebot-interface container. While I couldn’t quite get the gst_pipeline working, I was able to learn a lot about how the Duckietown Docker containers work and the complexities of the drivers that act as an interface between hardware and software. Regardless, I was able to successfully build and push my colordetector Docker image to DockerHub.
Duckietown Python Library
When running make docker test, pipdeptree raised an exception,
Step 8/11 : RUN pipdeptree
---> Running in 47b0acca7829
Traceback (most recent call last):
File "/usr/local/lib/python3.7/site-packages/pipdeptree.py", line 17, in <module>
from pip._internal.utils.misc import get_installed_distributions
ImportError: cannot import name 'get_installed_distributions' from 'pip._internal.utils.misc' (/cmput-412-website/usr/local/lib/python3.7/site-packages/pip/_internal/utils/misc.py)
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/usr/local/bin/pipdeptree", line 5, in <module>
from pipdeptree import main
File "/usr/local/lib/python3.7/site-packages/pipdeptree.py", line 20, in <module>
from pip import get_installed_distributions, FrozenRequirement
ImportError: cannot import name 'get_installed_distributions' from 'pip' (/cmput-412-website/usr/local/lib/python3.7/site-packages/pip/__init__.py)
The command '/bin/sh -c pipdeptree' returned a non-zero code: 1
make: *** [Makefile:66: build] Error 1
I had to revert pip to 21.2.4 to in the Dockerfile to resolve this.
RUN python3 -m pip install pip==21.2.4